




Manipulator cum Fibula
Introductio
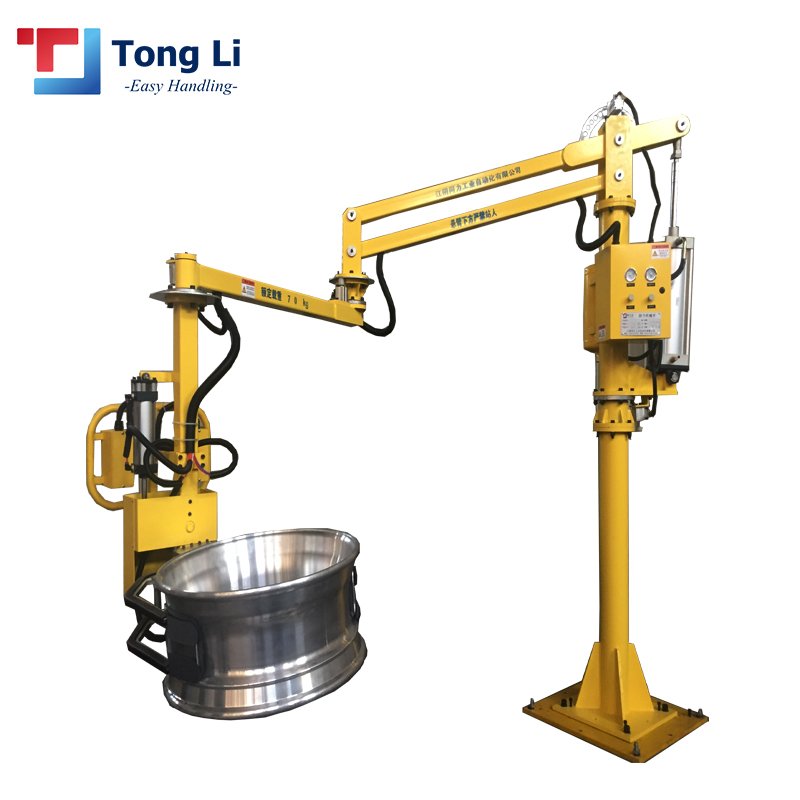
a) Manipulator adiuvans brachii duri eiusdem vim varia pondera a 2 ad 500kg librare potest.
b) Manipulator potentia adiuvatus constat ex statione librae, instrumento prehensionis, et structura institutionis.
c) Instrumentum manipulatorium principale est quod statum fluctuationis non-gravitatis materiarum (vel operum) in aere efficit.
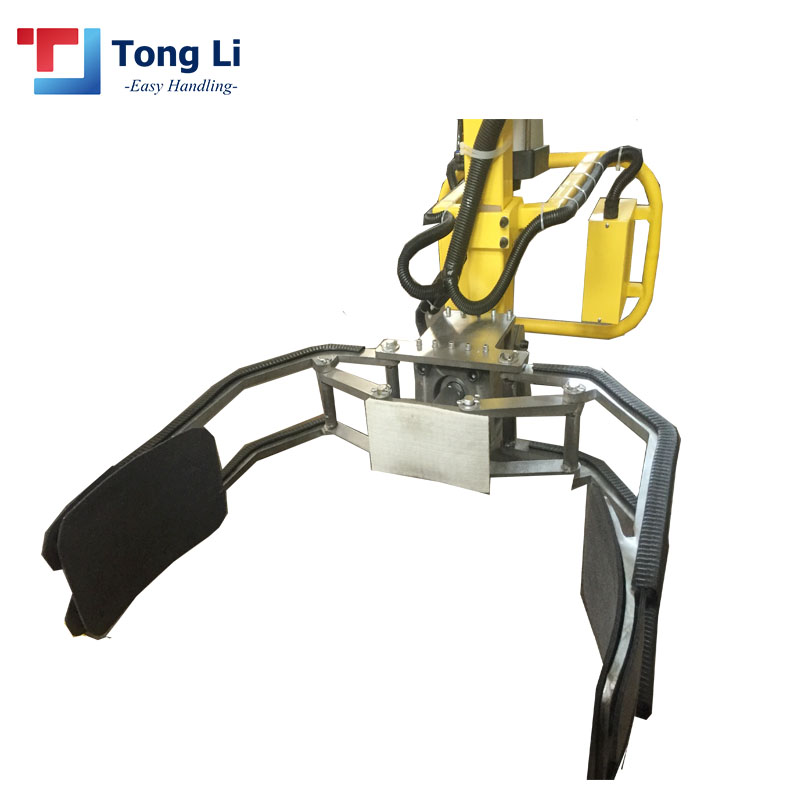
d) Manipulator est instrumentum quod prehensionem materiae laborandae efficit et requisita tractationis et compositionis congruentia usoris complevit.
e) Structura institutionis est mechanismus qui totum apparatum sustinet secundum aream servitii usoris et condiciones situs.

| exemplar instrumenti | TLJXS-YB-50 | TLJXS-YB-100 | TLJXS-YB-200 | TLJXS-YB-300 |
| Capacitas | 50 chiliogrammata | Centum chiliogrammata | CC chiliogrammata | Trecenti chiliogrammata |
| Radius laboris | 2500mm | 2500mm | 2500mm | 2500mm |
| Altitudo elevationis | 1500mm | 1500mm | 1500mm | 1500mm |
| Pressio aeris | 0.5-0.8Mpa | 0.5-0.8Mpa | 0.5-0.8Mpa | 0.5-0.8Mpa |
| Angulus Rotationis A | 360° | 360° | 360° | 360° |
| Angulus Rotationis B | 300° | 300° | 300° | 300° |
| Angulus Rotationis C | 360° | 360° | 360° | 360° |






a) Statum aequilibrii gravitatis materiarum diversorum ponderum assequi potest, quod aptum est ad accuratam operationem translationis materiarum.
b) Cum nullo onere, pleno onere et variae partes tractantur, systema mutationem ponderis sentire et statum fluctuantem oneris in spatio tridimensionali intellegere potest, quod ad accuratam positionem aptum est.
c) Proprietates plenae aequilibrii, motus lenis, etc., operatori permittunt ut facile tractationem, positionem et compositionem materiae laborandae perficiat.
d) Bracchium rigidum manipulatorem materiam per obstacula ferre potest; bracchium horizontale requisitis horizontalis collocationis et horizontalis remotionis materiarum in locis congruentibus satisfacere potest.
e) Systema semper capitis manipulatoris planum servare et magnam operabilitatem exercere potest.
f) Instrumentum frenandi articulationes, cum multis articulationibus rotatoriis ad materiam colligendam et collocandam in area lata efficiendam; instrumento frenandi instructus, operator motum manipulatoris quovis tempore per operationem interrumpere potest.



Hoc genus manipulatoris potentiae usque ad 500 kg materiae attollere potest. Radius laboris est circiter 2500 mm, et altitudo elevationis est circiter 1500 mm. Pro pondere materiae attollendae, minimum genus machinae eligendum est pro pondere maximo materiae; si onus maximum 200 kg manipulatoris adhibetur ad 30 kg materiae portandas, efficacia operationis certe non bona erit, gravissima sentietur. Instrumentum receptaculum aeris instructum est, quod cyclum actionis perficere potest si gas intercipitur. Simul, alarma emittet ut operarium admoneat. Cum pressio aeris ad certum gradum decrescit, functio auto-clausura incipiet ne materia declinet. Manipulator cum systemate securitatis, dum tractatur vel materia non in statione tuta collocatur, operator eam dimittere non potest. Cum variis fixuris non consuetis, manipulator potentiae brachio duro facile varias actiones processus perficere potest.





