


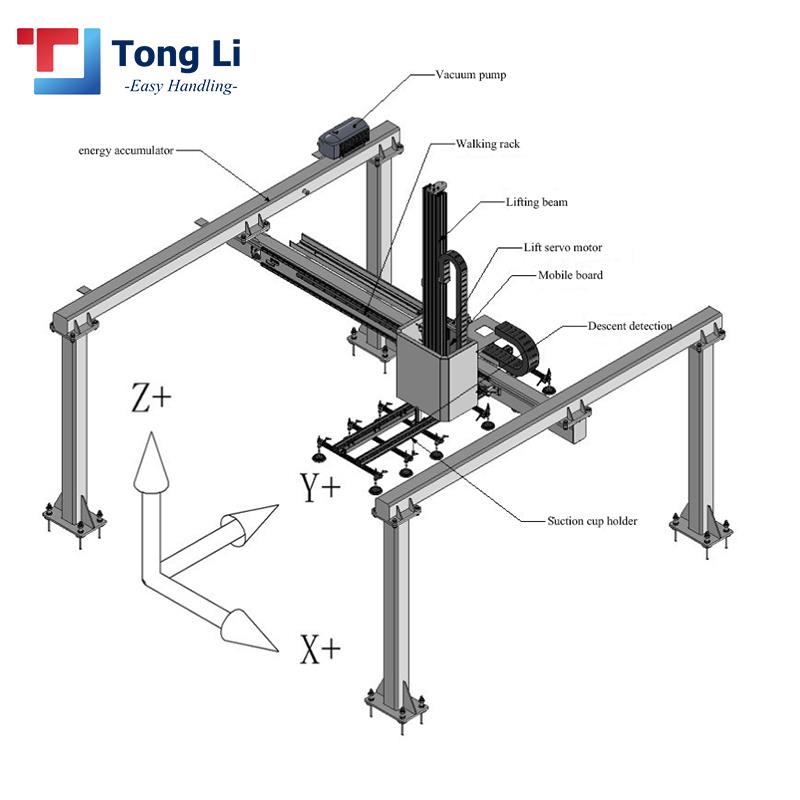
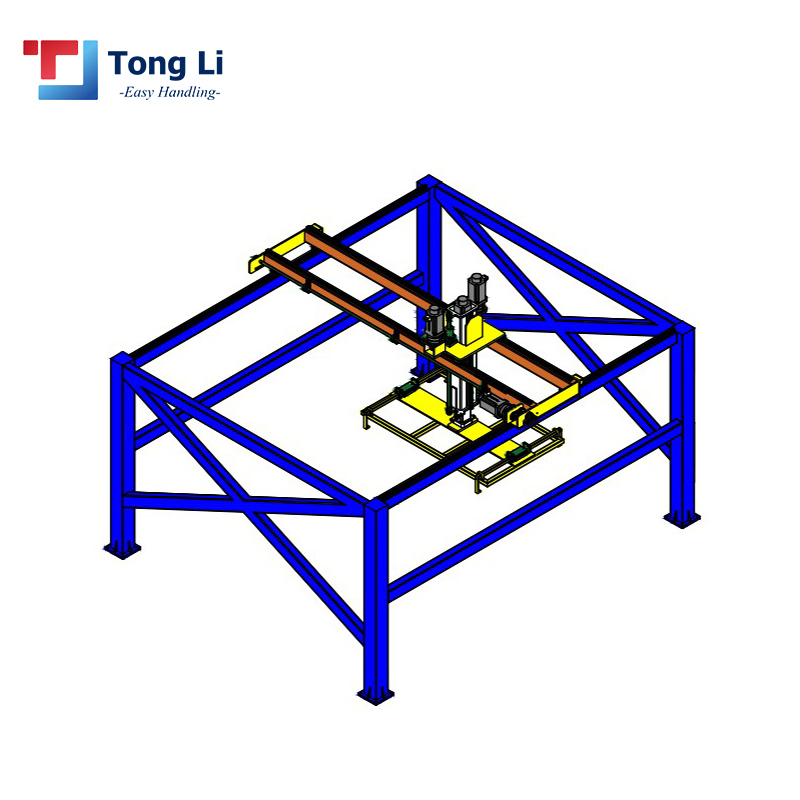
Automatum Gantry
Manipulator trabecularis technologiam processus integratam adhibet, quae apta est ad machinas instrumentorum et lineas productionis onerandas et exonerandas, ad conversionem partium fabricandarum, rotationem partium fabricandarum, et cetera. Simul, systema instrumentorum prehensionis et positionis altae praecisionis interfaciem normalem praebet ad processum automaticum roboticum, et accuratio positionis repetitae praecisionem magnam, efficientiam magnam et constantiam productorum in serie efficit.
Machina trabeculata est quae materiam, quae in receptaculum (velut in pyxide, sacculo textili, situla, etc.) imposita est, vel res communes, sive involutas sive non involutas, automatice struere potest. Res singulas ordine quodam tollit et in palletta disponit. Hoc facto, res in multis stratis strui et expelli possunt, quo facilius ad gradum proximum, involucri et ad horreum ad conservationem per furcam elevatricem mittendum, progredi potest. Machina trabeculata administrationem operationum intelligentem efficit, quae laborem magnopere minuere et simul res bene protegere potest. Etiam has functiones habet: praecavendam pulverem, humiditatem, solem, et detritionem in transportatione prohibendam. Quapropter late in multis societatibus productionis, ut in chemicis, potibus, cibis, cerevisiae, materiis plasticis, adhibetur ad varias formas productorum involucrorum, ut in pyxidibus, saccis, vasis metallicis, capsis cerevisiae, lagenis, et cetera, automatice struendas.
1. Industria partium autocineticarum
2. Industria alimentaria
3. Industria logistica
4. Processus et fabricatio
5. Industria tabaci et alcoholis
6. Industria lignea tractanda
7. Industria machinarum instrumentorum tractandarum
| Manipulator automaticus trabecularis | |||||
| Onus (kg) | 20 | 50 | 70 | centum | 250 |
| Celeritas lineae | |||||
| Axis X (m/s) | 2.3 | 1.8 | 1.6 | 1.6 | 1.5 |
| Axis Y (m/s) | 2.3 | 1.8 | 1.6 | 1.6 | 1.5 |
| Axis Z (m/s) | 1.6 | 1.3 | 1.3 | 1.1 | 1.1 |
| Ambitus operis | |||||
| Axis X (mm) | 1500-45000 | 1500-45000 | 1500-45000 | 1500-45000 | 1500-45000 |
| Axis Y (mm) | 1500-8000 | 1500-8000 | 1500-8000 | 1500-8000 | 1500-8000 |
| Axis Z (mm) | 500-2000 | 500-2000 | 500-2000 | 500-2000 | 500-2000 |
| Accuratio positionis repetita (mm) | ±0.03 | ±0.03 | ±0.05 | ±0.05 | ±0.07 |
| Systema lubricationis | Lubricatio concentrata vel independens | Lubricatio concentrata vel independens | Lubricatio concentrata vel independens | Lubricatio concentrata vel independens | Lubricatio concentrata vel independens |
| Celeritas accelerata (㎡/s) | 3 | 3 | 3 | 2.5 | 2 |


